1. 기술로드맵
[ 지능형 농업 로봇 기술개발 로드맵 ]
|
핵심기술
| 노지, 과수 작업 등 다양한 농작업 자동화에 필요한 로봇 이동/조작지능 기반 지능형 농업 로봇 핵심기술 개발 및 상용화 원천기술 확보
|
`23년
| `24년
| `25년
| `26년
| `27년
| 최종 목표
|
비정형 3차원 환경 맵핑 기술
|
 | 실시간 3차원 농작업 공간 맵핑 및 구조인식 90%이상 모듈
|
수확 작업을 위한 비정형, 유연 객체 로봇 조작 기술
|
 | 제시한 작물 수확 성공률 80% 이상 솔루션 (일반 작업자와 동등한 속도)
|
3차원 환경 로봇 위치 및 자세, 지형 인식 기술
|
 | 로봇 이동 지능 기반의 위치인식 솔루션 제품화
|
로봇 경로계획 및 주행 제어 기술
|
 | 트랙터, 이앙기 등 다양한 기존 농기계와 로봇조작용 플랫폼을 포함한 동작 계획 및 제어 모듈 제품화
|
반자율 주행/조작제어 등 로봇-사용자 상호작용 기술
|
 | 제안 농작업에 대한 사용자 편이성 및 생산성 향상 도구 제품화
|
* 출처 : 자체작성
|
2. 개요
가. 정의 및 필요성
□ 농업생산과 유통 및 소비의 전 과정에서 농작업 및 서비스 환경을 스스로 인식하고 상황을 판단하여 자율적인 동작을 통해 지능적인 작업과 서비스를 제공하는 로봇
▪ 지능형 농업 로봇은 노지, 과수 작업 현장에서 이동 (경운, 제초, 파종, 이앙, 운반 등) 동작과 조작 (수분, 전정, 적과, 수확, 포장 등) 동작의 자동화에 필요한 지능형 기술을 포함
- ICT 기술을 접목하여 생산성과 품질을 향상하기 위한 농작업 모니터링, 예측진단 등과 대비하여 로봇의 물리적 상호작용 기능인 이동과 조작기능을 적극적으로 활용하여 농작업의 자동화 및 효율을 추구함
- 농작업 대상, 환경, 절차의 비정형성, 계절적 요소를 극복하고 농작업의 자동화와 효율을 달성하기 위해 작업환경 맵핑, 작업 대상과 환경에 대한 인식 및 학습, 작업계획 등 인공지능과 로봇 제어 기술의 적극적인 결합을 이용
- 농작업에 특화된 로봇뿐만 아니라 트랙터, 콤바인, 이앙기, 방제기, 제초기 등 전통적인 농기계에 AI 및 로봇 기술을 접목하여 이동 및 조작기능을 향상한 플랫폼의 형태도 포함
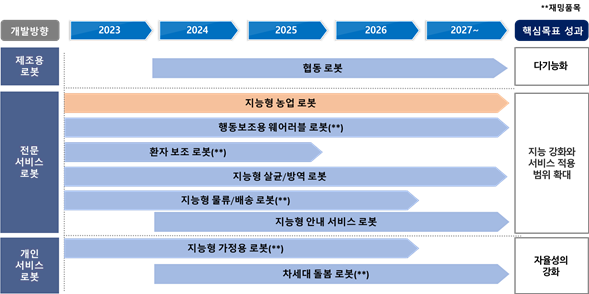
□ 지능형 농업 로봇은 지능형로봇 분야에서 전문 서비스 로봇에 포함되는 전략품목으로, 지능 강화와 서비스 적용 범위 확대를 통해 지능형로봇 분야에 있어서 중소기업의 기술경쟁력 확보가 가능할 것으로 전망됨
[ 지능형로봇 품목로드맵 내 지능형 농업 로봇 ]
|
 |
* 출처 : 자체 작성
|
□ 해외 기술 선진국의 경우 AI, 로봇 기술을 탑재한 첨단 농기계와 농업용 로봇은 연구개발 단계를 넘어 시장형성 초기 단계에 진입함에 따라 국내 실정에 적합한 첨단 농업로봇 기술의 개발이 필요
▪ 노지 농업의 경우 트랙터, 콤바인, 관리기 등 전통 농기계와 로봇 기술의 융합으로 로봇 농기계 형태로 진화를 시작하였고 글로벌 농기계 시장에서 비중이 급격하기 증가 중 특히, 대규모 경작, 대형 기계 중심으로 정밀 GPS와 자동 조향 제품을 탑재한 자율주행 트랙터, 콤바인 등이 제품화되었고 최근의 AI 학습과 로봇 자동화 기술의 접목으로 새로운 시장이 형성
▪ 향후 농업용 로봇은 기존의 농작업 기계화 단계를 넘어 반 자율형 농업용 로봇, 완전 자율형 농업용 로봇으로 발전 예상
▪ 국내 중소형 규모 경작환경에 적합한 지능형 농업 로봇 솔루션을 개발하여 국내뿐 아니라 농업 여건이 유사한 중국, 일본, 인도 등 신흥 국가를 대상으로 시장확보 필요
나. 범위 및 분류
□ 지능형 농업 로봇의 경우 로봇 플랫폼을 구성하는 센서, 제어부품, 소프트웨어뿐만 아니라 이를 운영하기 위한 운영시스템, 인공지능, 클라우드 등 시스템을 포함하며, 사용자에게 다양한 서비스를 제공할 수 있는 전략 시스템 기술로 다양한 형태의 관련 산업의 활성화에 기여
[ 지능형 농업 로봇 품목 산업구조 ]
|
후방산업
| 지능형 농업 로봇
| 전방산업
|
인공지능, 소프트웨어,
로봇 센서 및 제어기,
클라우드 컴퓨팅 등
| 로봇 이동지능 기반 (경운, 제초, 이앙, 방제, 운반용 로봇 등),
로봇 조작지능 기반 (수분, 전정, 적과, 수확, 포장 로봇 등),
기타 지능형 트랙터,
콤바인, 이앙기 등
| 위치 및 가이던스 서비스,
원격 생산 서비스,
농업로봇 자동화 컨설팅 등
|
* 출처 : 자체 작성
|
□ AI 활용 형태에 따라 향후 원격제어 서비스, 자율 농작업 서비스, 다중 농작업 서비스 솔루션화 가능
[ 인공지능 기반 지능형 농작업 서비스 형태 ]
|
AI 활용 형태
| 주요 내용
|
농업용 로봇 원격제어 서비스
| • 3D 라이다, 깊이 카메라 등을 이용한 3차원 SLAM (Simultaneous Localization And Mapping) 기술을 이용한 작업공간 맵핑 및 인식
• 5G, WIFI 매쉬망 등을 이용한 비가시권 원격운전 서비스 환경 제공
• AI 기반의 환경/상황인지 기능과 융합하여 사용자와 농업용 로봇 간의 협조제어 플랫폼 지원
|
농업용 로봇 자율 농작업 서비스
| • 노지 환경의 경우 정밀 위치인식 솔루션과 인공지능기술을 결합하여 다양한 농작업에 대한 경로 계획, 주행 제어 등 솔루션 서비스 가능
|
다중 농업용 로봇 농작업 서비스
| • 중대형 규모의 농작업 환경 혹은 분산형 농작업 환경의 경우 다중 농업용 로봇의 동시 제어가 가능한 클라우드 서비스 가능
• AI 기반의 작업계획, 경로 계획, 로봇 동작 계획을 실현하는 플래닝 솔루션 제공
|
3. 산업 및 시장분석
가. 시장분석
◎ 농업용 로봇을 도입하고자 하는 수요 증대
□ 노동비용, 농산물 생산성, 부가가치, 작업 여건 및 생산 환경 개선 등 산업 환경 변화에 따른 로봇 도입 시 비용 대비 효과 측면의 이점이 부각
▪ 농업은 세계에서 가장 오래된 사업 관행 중 하나였으며, 기후변화에 대처하고 수율을 개선할 수 있는 시간이 지남에 따라 발전
▪ (a) 작업량이 많아도 작업의 복잡함이나 변동의 정도에 따라 로봇 기술의 활용이 전용 기계 이상의 효과
- 로봇 도입의 이점 발생 가능 영역
▪ (b) 작업이 복잡해도, 로봇 기술을 도입하여 자동화 혹은 작업의 간소화를 실현할 수 있는 경우
▪ (C) 작업 내용이 수작업의 숙련도로 따라갈 수 없을 만큼 번번이 바뀌는 경우
□ FTA 확산으로 글로벌 경쟁이 심화하고 수출을 통한 시장 접근성이 확대되는 위기와 기회가 공존
▪ 정보통신ㆍ바이오ㆍ에너지 분야 기술과의 융합을 통한 새로운 성장산업 등장, 신흥시장 창출의 기회
▪ 지구 온난화, 기상 이변의 빈발로 농업생산의 감소 위험이 증가하는 한편, 새로운 소득 작목ㆍ품종 개발의 기회로 작용
▪ 농업경영주의 고령화가 심화하고, 중소 농 비율이 높으며, 전반적인 농가소득은 정체
▪ 농업 내부 투자 여력 부족으로 농가의 자본투자가 정체되고, 농업 생산성은 다소 성장했으나 대외 경쟁력과 기술 수준은 정체
◎ 자동화 및 로봇화 연구와 투자 진행
□ 농업의 자동화ㆍ로봇화는 작업 속도의 향상 및 효율성 증대로 인한 작업 시간의 단축
▪ 인공지능을 갖는 로봇이 알고리즘을 통해 데이터 분석 후 농업을 자동화
▪ 다수 농업용 로봇을 add-on 방식 무인 생산
▪ 온실, 농기계 등의 정보를 실시간으로 관측하여 농작업을 정밀하게 자동화하여 품질과 생산량 증가
▪ 기술 융합으로 기존의 식량 부족 문제, 고령화에 따른 노동력 문제 해결
나. 시장분석
◎ 세계시장
□ 2021년 75억 7,000만 달러였던 지능형 농업 로봇의 세계 시장규모는 2026년에는 175억 4,000만 달러 규모로 증가할 것으로 전망됨
[ 지능형 농업 로봇 세계 시장규모 및 전망 ]
|
(단위 : 백만 달러, %)
|
구분
| `20
| `21
| `22
| `23
| `24
| `25
| `26
| CAGR
(`20~`26)
|
세계시장
| 6,399
| 7,570
| 8,955
| 10,594
| 12,533
| 14,826
| 17,540
| 18.30
|
* 출처: Global Agricultural Robots Market Report 2022: Technological Advancements in IoT, Robotics and Artificial Intelligence Accelerating Growth(ReserchandMarkets, 2022.08) 자료를 재구성하여 추산
|
◎ 국내시장
□ 지능형 농작업기 국내 시장규모는 2021년 3조 576억 원에서 연평균 9.20%로 성장하여 2026년 4조 7,478억 원으로 증가할 것으로 전망
▪ 2020년 기준 5.4조 원 규모의 국내 스마트 농업 시장에서 지능형 농작업기 시장이 차지하는 비중은 51.85%로 시설농업(40.70%, 2.2조원), 식물공장(7.4%, 0.4조 원) 등의 타 스마트농업 분야보다 큰 규모
[ 지능형 농작업기 국내 시장규모 및 전망 ]
|
(단위 : 억 원, %)
|
구분
| `20
| `21
| `22
| `23
| `24
| `25
| `26
| CAGR
(`20~`26)
|
국내시장
| 28,000
| 30,576
| 33,389
| 36,461
| 39,815
| 43,478
| 47,478
| 9.20
|
* 출처: Verified Market Research, 2020, IP Next, 2020, KSIA 2021 자료를 재구성하여 추산
|
4. 기술개발 동향
가. 기술개발 이슈
□ 기술경쟁력
▪ 지능형 농업 로봇은 미국이 최고기술국으로 평가되었으며, 우리나라는 최고기술국 대비 72.0%의 기술 수준을 보유하고 있으며, 최고기술국과의 기술격차는 2.6년으로 분석
▪ 중소기업의 기술경쟁력은 최고기술국 대비 54.2%, 기술격차는 3.6년으로 평가
▪ EU(88.8%)>일본(78.9%)>한국(72.0%)>중국(62.1%)의 순으로 평가
□ 기술수명주기(TCT)
*설명: 기술수명주기(TCT, Technical Cycle Time): 특허 출원연도와 인용한 특허들의 출원연도 차이의 중앙값을 통해 기술 변화속도 및 기술의 경제적 수명을 예측
▪ 지능형 농업 로봇은 9.04의 기술수명주기를 지닌 것으로 파악
나. 생태계 기술동향
□ (기술동향) 구동 방식에 따라 Level 1~5까지 단계별로 기술이 구분되며, 정보통신 기술의 융합으로 인공지능, IOT, 무인 수송 수단 등을 이용하기 때문에 ICTㆍBTㆍNT 기술의 급속한 발전과 함께 기술과 산업 간의 융합 위주의 기술개발이 예상
□ (플레이어) Deere & Company(미), AGCO(미), CLAAS(독), Kubota(일), CNH Industrial(영)
□ (중소기업) 대동산업, LS엠트론, Mahindra
다. 국내 연구개발 기관 및 동향
[ 지능형 농업 로봇 주요 연구조직 현황 ]
|
기관
| 연구분야
|
한국로봇융합연구원
(KIRO)
| • 미래 농업을 위한 로봇 기술 및 자동화 시스템 연구개발
• 스마트 팜 시스템 기술 개발 (농작물 생장 모니터링, 물류 이송 등)
• 모바일 농업용 로봇, 근력 증강 슈트 기술 개발
|
한국전자통신연구원
(ETRI)
| • 지능형 스마트팜 서비스 제공을 위한 엣지-IoT클라우드 기반 스마트팜 데이터 서비스 플랫폼 표준 개발
• 스마트팜 통합운영 및 제어시스템 개발
|
5. 전략품목 기술로드맵
가. 핵심기술 리스트
[ 지능형 농업 로봇 핵심기술 ]
|
핵심기술
| 개요
|
비정형 3차원 환경 맵핑기술
| ▶ 노지, 과수 등 비정형 환경에서 농작업을 수행하기 위한 3차원 공간 센싱과 인식을 위한 로봇지능 기술
|
수확 작업을 위한 비정형, 유연객체 로봇 조작 기술
| ▶ 다양한 비정형, 유연 작물의 수확을 위한 작물 인식 및 수확 작업수행을 위한 로봇지능 기술
|
3차원 환경 로봇 위치 및 자세, 지형 인식 기술
| ▶ 노지, 과수 현장에서 자율/반자율 작업수행을 위한 3차원 환경에서의 6자유도 로봇 자세 및 지형 인식 기술
|
로봇 경로계획 및 주행 제어 기술
| ▶ 수확, 운반 등 이동 및 조작지능 기반의 농작업 구현을 위한 로봇 매직핸드 및 이동플랫폼의 경로계획과 제어기술
|
반자율 주행/조작제어 등 로봇-사용자 상호작용 기술
| ▶ 비정형 환경에서 로봇 이동 및 조작지능 기반 농작업 수행을 위해 작업 생산성을 확보하고 로봇 사용 편이성을 개선하는 로봇-사용자 인터페이스 기술
|
나. 중소기업 기술개발 전략
□ 노지, 과수재배 현장의 비정형 요소와 가격 비중이 중요한 농업 현장을 고려하여 대상 작물에 특화된 형태의 로봇 주행/조작지능 기반의 로봇지능 기술개발 필요
□ AI와 로봇 기술의 활용으로 단위 농작업 자동화를 확장하여 농작업 서비스 솔루션 마케팅 (특정 작물, 특정 농기계 플랫폼의 자동화를 확장하여 원격제어 서비스, 자율 농작업 서비스, 다중 농작업 서비스 관리)등 솔루션화 추진 필요
□ 비정형 환경에서의 농작업 자동화를 위한 인식용 센서, 지능형 로봇제어 플랫폼 등을 ISOBUS와 같은 국제표준규격 호환 형태로 개발하여 시장 확대 추진 필요
다. 기술개발 로드맵
핵심기술
| 기술
요구사항
| 연차별 개발목표
| 최종목표
| 연계
R&D
유형
|
1년차
| 2년차
| 3년차
| 4년차
| 5년차
|
비정형 3차원 환경 맵핑 기술
| 농작업 공간 실시간 센싱, 표준 3차원 데이터구조화 및 구조분석 정확도
| 작업자 개입을 통한 농작업 환경 3차원 맵핑
| 3차원 SLAM 기반 농작업 환경 맵핑
| 3차원 공간구조분석 정확도 60% 이상
| 3차원 공간구조분석 정확도 80% 이상
| 3D 구조분석 정확도 90%↑ 및 표준 3D 공간 데이터 전송
| 실시간 3차원 농작업 공간 맵핑 및 구조인식 90%이상 모듈
| 산학연
|
수확 작업을 위한 비정형, 유연 객체 로봇 조작 기술
| 수확 대상에 대한 인식 및 수확을 위한 동작 제어 성공률
| 제시한 작물 수확에 대해 작업자 대비 50% 이상 속도, 작업 품질 확보
| 60% 이상
| 70% 이상
| 80% 이상
| 특정 수확 농작업에 대해
일반 작업자와 동등한 속도의 작업수행
| 제시한 작물 수확 성공률 80% 이상 솔루션 (일반 작업자와 동등한 속도)
| 산학연
|
3차원 환경 로봇 위치 및 자세, 지형 인식 기술
| 로봇 이동 기능 구현을 위한 6자유도 자세 인식 정확도 및 지형 인식
| 농작업 환경에서 로봇이동횡오차율 30% 이내
| 농작업 환경에서 로봇이동횡오차율 20% 이내
| 농작업 환경에서 로봇이동횡오차율 10% 이내
| 굴곡 지형 및 경사지 인식
| 비정형
환경 내
주행영역 자동 판단
| 로봇 이동 지능 기반의 위치인식 솔루션 제품화
| 산학연
|
로봇 경로계획 및 주행 제어 기술
| 수확, 운반 등 로봇 이동, 조작기능 구현을 동작 계획 및 제어 성능
| 다양한 농작업 기구학 반영 모델링 및 제어알고리즘 제시
| 3개 농작업 이상
| 5개 농작업 이상
| 6개 농작업 이상
| 두 대 이상 복수 농업로봇에 대한 협력 작업계획 및 주행 제어
| 다양한 기존 농기계와 로봇조작용 플랫폼을 포함한 동작 계획 및 제어 모듈 제품화
| 산학연
|
반자율 주행/조작제어 등 로봇-사용자 상호작용 기술
| 농업 로봇 사용에 따른 편이성
| 제안 농작업에 대한 반자율 모듈 및 사용성 평가 (60%↑)
| 제안 농작업에 대한 반자율/자율 모듈 및 사용성 평가 (60%↑)
| 2종 이상 농작업에 대한
반자율/자율 모듈 및 사용성 평가 (70%↑)
| 3종 이상 제안 농작업에 대한 사용성 평가 (70%↑)
| 제안 작물 재배 전주기에 대한 사용성 평가 (70%↑)
| 제안 농작업에 대한 사용자 편이성 및 생산성 향상 도구 제품화
| 산학연
|